Hello, there was an error in my manipulator. The robot does not correctly determine the position of motor number 3. The photo shows its real position at zero point. Is there a way to set the correct value?

Hi Vikarobika,
What is the SN of the arm? Is there any special operation? Generally the zero position will not lost.
Reset command: D13 I*, * stands for joint ID(Please use this command carefully)
- Open manual mode, move joint3 to its original zero position.
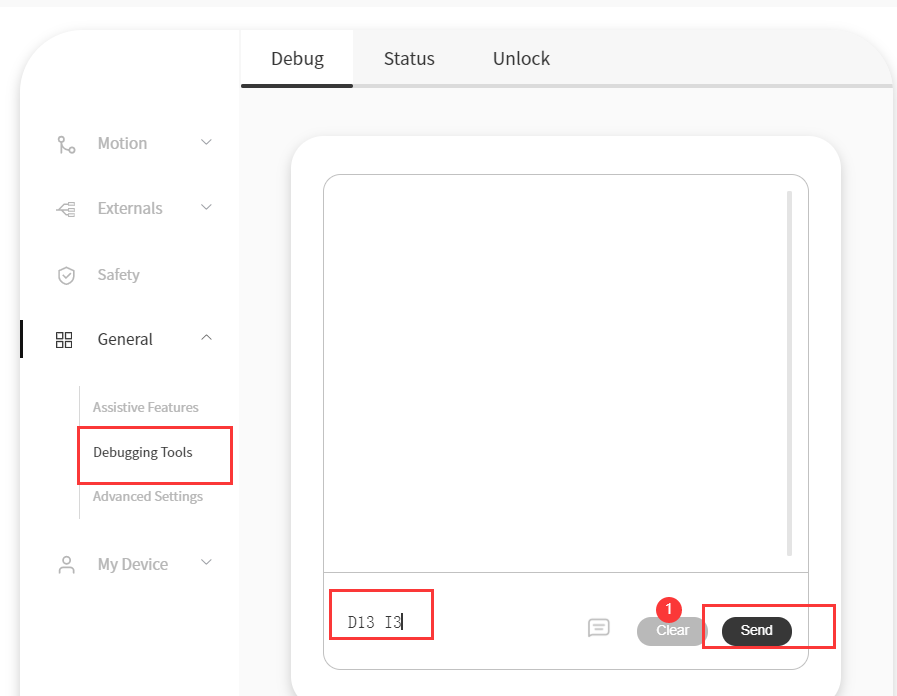
- Enter into ‘Settings-Advanced Tools-Debugging Tools-Joint debug’, send ‘D13 I3’, it will send the current position of joint3 as 0°, press down the E-stop button and release to take effect.
Best regards,
Minna