- 固件和Studio升级问题
(1)固件和Studio的更新内容是存在云端的,升级时需要将控制器连接到互联网。
(2)升级参考【Official】How to upgrade xArm Studio and xArm Firmware
2.电脑连不上控制器/Studio
(1)可能电脑的IPV4网段不对。xArm 控制器的网段在192.168.1.xxx(x是1-255之间的数字),所以电脑的IPV4网段必须在192.168.1.1-192.168.1.255之间(尾号是1-255,且不能与控制器的IP地址尾号相同)。
可以查一下电脑的IPV4地址,如果电脑的IPV4地址网段不在192.168.1.xxx,需要将IPV4网段改到192.168.1.1-192.168.1.255(尾号是1-255,且不能与控制器的IP地址尾号相同)。
Windows如何更改IPV4网段可以参考以下:
https://zhidao.baidu.com/question/545476705.html
(2)如果自己的电脑的网段没有问题,但还是连不上控制器,可以尝试打开命令窗口(CMD打开),输入ping 192.168.1.xxx(192.168.1.xxx是用户的控制器IP地址)
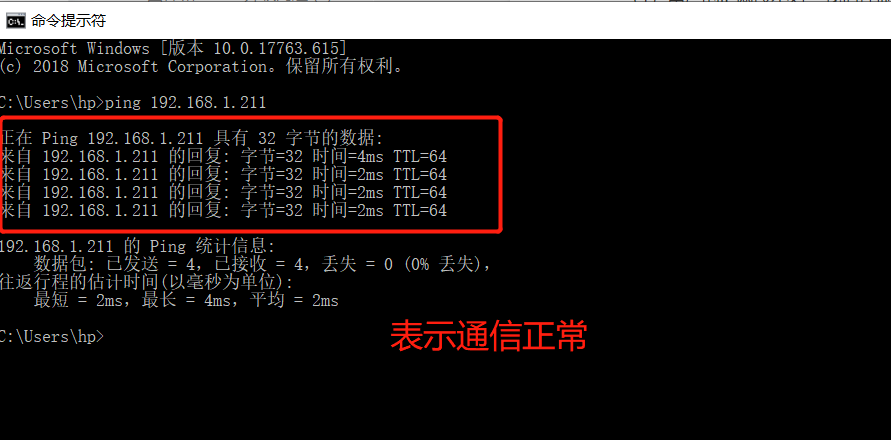
如果电脑和控制器的通信正常:
但是连不上Studio,可以试试用Python/C++或者ROS通信。如果通信正常,用Python/C++ SDK或者ROS能通信,但是用Studio就连不上,这个可能是内置的Studio没有启动或者早期的控制器里没有内置Studio,这种情况请联系我们。
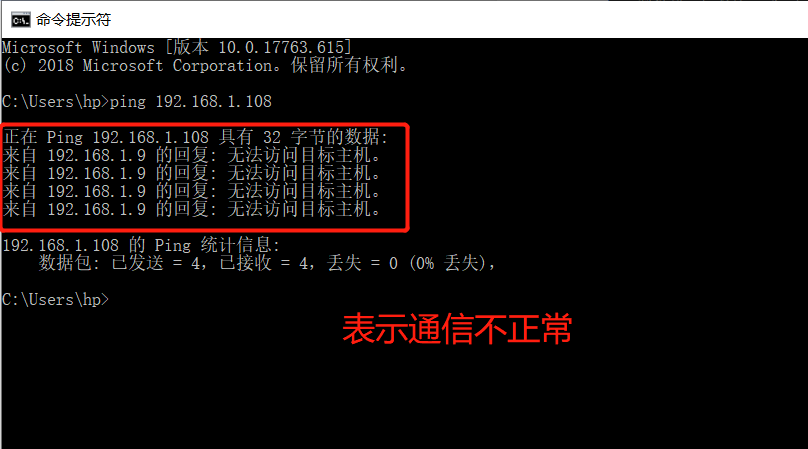
如果电脑和控制器的通信不正常:
(I)可能是将网线插到了控制器的RS-485的接口上,或者在本次控制器开机的时候不小心将网线插入了485的接口导致控制器启动失败。可以让将网线先拔出来,重启控制器等待60秒后,再将网线插入控制器的网口接口。
(II)可能是硬件问题,可以尝试换条网线,或者换个电脑试试。
(III)可能是控制器本身的硬件问题,建议联系技术支持。
3.Python/C++SDK或ROS报错,报错内容是"Error Code xx"
Error Code xx是机械臂、控制器、机械爪或者吸头的报错,目前只有xArm Studio集成了清晰完整的自然语言报错内容,Python/C++ SDK或者ROS一般只有错误码,看不到具体的问题。如果使用SDK/ROS出现报错"Error Code xx",需要使用Studio连接控制器,将报错截图或拍照发给我们。
4.Python/C++SDK或ROS报错,但报错内容不是"Error Code xx"
一般跟硬件无关,可能是使用SDK或者ROS的过程中遇到了问题,建议直接将错误截图/拍照发给我们。
5.关节报"多圈编码器异常"(一般是第3关节)。
下载这个软件清错(文件内含使用手册)
https://drive.google.com/open?id=1zhWkVTCdJYv2eMCrhY6wNc82jYXnXOMB
清完错之后重启控制器。如果不能解决问题,建议联系我们。