Hi uFactory. We are using xArm7 in velocity control mode from C++. Basically as follows
arm.set_mode(1);
while(true) {
// get the qdot from our own custom software
std::array<float, 7> qdot_command = ...
arm.vc_set_joint_velocity(qdot_command.data(), /*is_sync=*/false, /*duration=*/0.1);
}
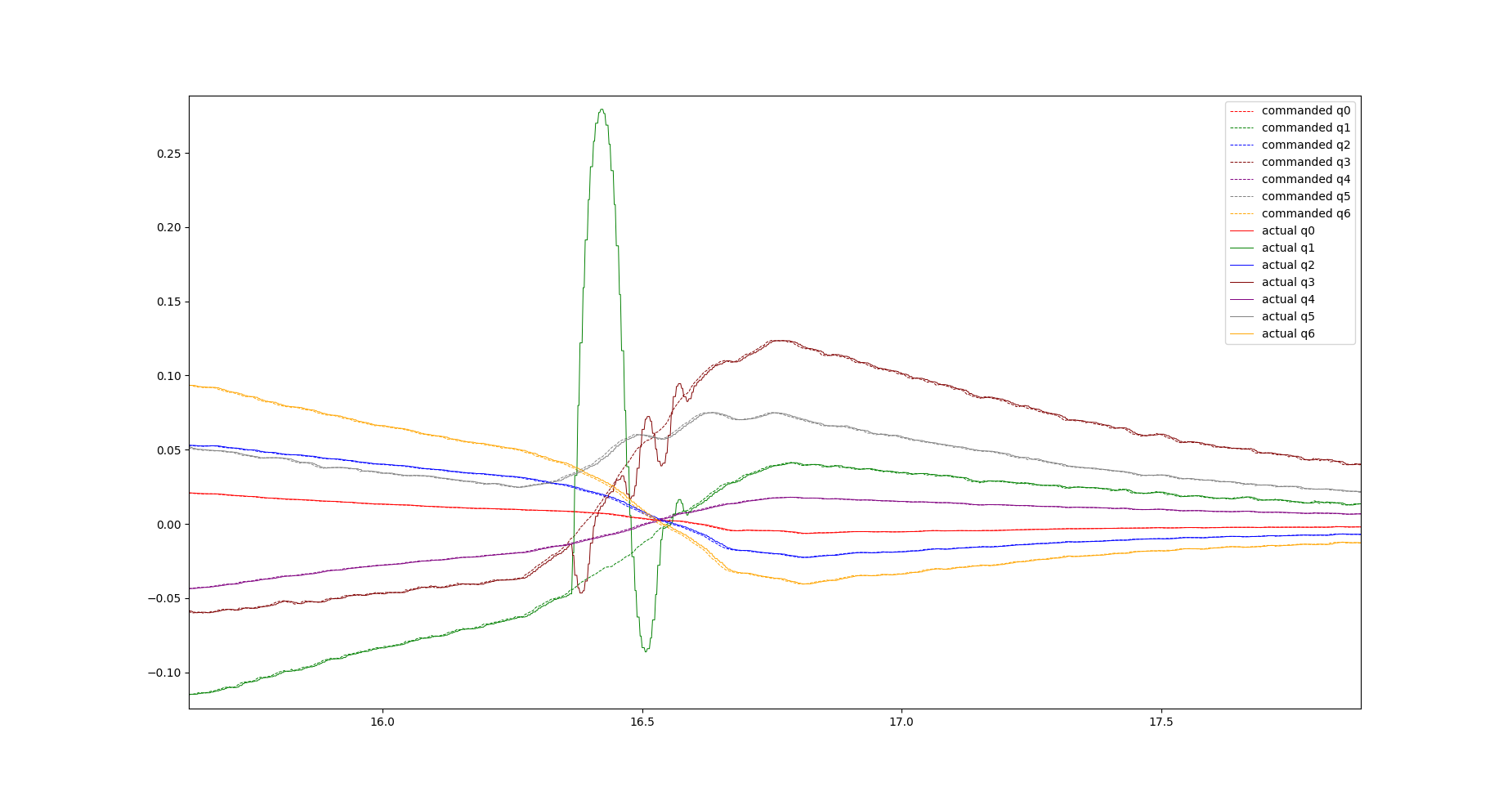
Each iteration of the loop takes less than 5ms. We are generally seeing good tracking of the velocity, except some intermittent spikes as pictured in the radians/sec vs sec diagram below.
Besides the XArm C++ API, it requires the Eigen library. I will follow up with the serial number by email. Please let me know if your team has any issues building the example whether your team can reproduce the problem.